




설명
이 애플리케이션 노트에서는 전해 기울기 센서 및 신호 조절기에서 기울기 측정을 얻는 방법을 설명합니다. The Fredericks Company의 신호 컨디셔너에서 사용할 수 있는 각 프로토콜에 대한 회로도와 코드를 다룹니다. 모든 예제는 Arduino Uno가있는 코드와 회로를 보여 주므로 다른 플랫폼을 사용할 때 코드에 차이가 있습니다. 각 예제는 센서의 원시 출력을 다양한 단위로 제공합니다. 이들 유닛들 중 임의의 것은 애플리케이션 노트(1005)에 설명된 방법들을 사용하여 각도로 변환될 수 있다.
아날로그
1-6200-007 및 1-6200-012 신호 컨디셔너 모두 아날로그 출력을 가지고 있습니다. 1-6200-007에서는 축과 온도가 각각 핀 XA, YA 및 T에서 출력됩니다. 아두 이노에 연결하려면 신호 컨디셔너에서 Arduino의 아날로그 입력 핀으로 직접 연결해야합니다.
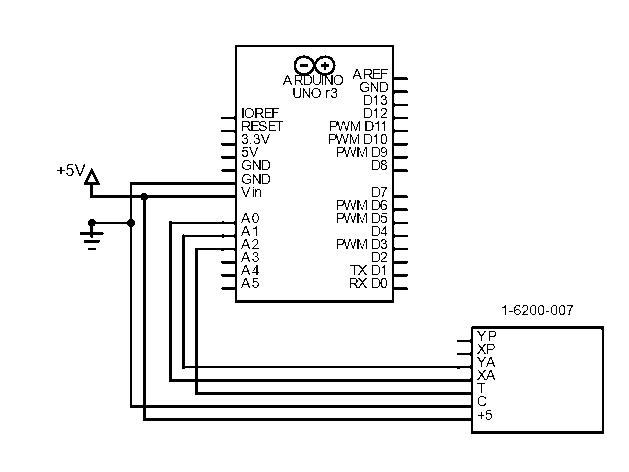
그림 1 아날로그를 사용하여 아두이노에 1-6200-007을 연결하기위한 회로도
1-6200-012 신호 컨디셔너는 아날로그 온도 출력이 없으므로 RS-232를 사용하여 온도를 읽어야 합니다. 1-6200-012에서 의 온도 읽기 온도에 대한 자세한 내용은 RS-232섹션을 참조하십시오.
회로를 조립하면 아두이노의 analogRead() 함수를 사용하여 데이터를 읽을 수 있습니다. 이 예는 다음과 같습니다.
x = 아날로그 읽기 (A0); y = 아날로그 읽기 (A1); 온도 = 아날로그 읽기 (A2);
이 코드의 결과는 아날로그 핀의 전압을 나타내는 원시 값이 됩니다. 이 측정의 해상도는 전압을 읽는 데 사용되는 하드웨어에 따라 달라집니다. 아두이노 우노에서 아날로그 핀은 10비트해상도를 가지고 있습니다.
PWM
PWM 측정은 1-6200-007 신호 컨디셔너에서 사용할 수 있습니다. PWM을 사용하면 신호 컨디셔너의 디지털 XP 및 YP 핀에서 x 및 y 기울기 각도를 읽을 수 있습니다. 온도 PWM 출력이 없으므로 아날로그 핀에서 읽어야 합니다. 이 설정에 대한 회로도는 그림 2에 표시됩니다.
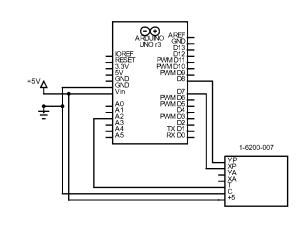
그림 2 PWM을 사용하여 아두이노에 1-6200-007연결회로 연결하기 위한 회로도
PWM 출력은 PWM 핀뿐만 아니라 Arduino의 모든 디지털 핀에 연결할 수 있습니다. 이 예제에서는 핀 D7과 D8이 비PWM 핀을 모두 사용합니다.
Arduino로 PWM 신호를 읽는 것이 펄스In() 기능으로 수행하는 것이 가장 좋습니다. 펄스In() 함수는 펄스가 높거나 낮은 상태에서 지속되는 시간을 시간입니다. 이 경우, 우리는 높은 상태를 시간 것입니다.
x = 펄스인 (XPIN, 높음); y = 펄스인(YPIN, HIGH); 온도 = 아날로그 읽기 (A0); char res[50]; 스프린트 (res, "X: %i, Y: %i, 온도: %i", x, y, 온도); 직렬.println(res)
결과는 마이크로초 단위로 펄스의 길이가 될 것입니다. pulseIn() 기능은 10μs만큼 짧은 펄스를 판독할 수 있으며, 이는 최대 8ms 펄스의 측정이 10비트 출력과 유사한 정확도를 갖는다는 것을 의미합니다. 이 정확도는 장치를 읽는 장치가 더 작은 펄스를 감지할 수 있다면 더 높을 것입니다.
SPI
SPI는 1-6200-005 신호 컨디셔너에서 사용할 수 있는 동기 연속 통신 프로토콜입니다. 이 프로토콜은 MISO(슬레이브 아웃 마스터), MOSI(마스터 아웃 슬레이브 인), CLK(직렬 시계), SS(슬레이브 선택)의 4개의 연결을 사용하여 마스터/슬레이브 기술에서 작동합니다. 마스터는 MOSI(1-6200-005에 IN로 표시됨)를 통해 슬레이브에 명령을 보내고, 슬레이브는 MISO(1-6200-005에 OUT로 표시됨)를 통해 응답합니다. CLK는 슬레이브의 통신을 동기화하는 마스터가 만든 시계입니다. SS는 슬레이브를 활성화하는 데 사용됩니다. 이 핀은 SPI가 한 버스에서 여러 장치를 지원하는 방법입니다(자세한 내용은 "SPI Bus" 섹션을 참조하십시오).
아두이노 우노는 MOSI, MISO 및 CL에 미리 정의된 핀을 가지고 있습니다. 다음은 다음 표에 표시됩니다.
| MOSI | D11 |
| 미소 | D12 |
| CLK | D13 |
아두이노에 연결하기 위한 회로도는 그림 3에 도시되어 있다.
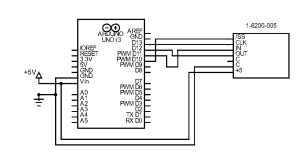
그림 3 1-6200-005를 SPI와 함께 아두이노에 연결하기 위한 회로도
센서와 통신하기 위해 아두이노의 SPI 라이브러리를 사용합니다. SPI.begin()은 SPI 라이브러리를 초기화합니다(그러나 통신을 열지 않음). 이 회로에는 하나의 SPI 장치만 있기 때문에 핀 10(SS)이 LOW로 설정되어 해당 핀으로 제어되는 슬레이브가 가능합니다. 이 전체 프로그램에 대 한 LOW로 설정 됩니다. 이 회로에서 슬레이브를 비활성화할 이유가 없습니다.
void setup() {
SPI.begin(); // initialize SPI
digitalWrite(10, LOW); // enable slave 1
}
라이브러리를 초기화되었으므로 신호 컨디셔너와의 연결을 열어야 합니다. SPI.begin트랜잭션() 함수를 사용하여 수행됩니다. 이 함수는 SPISettings 개체인 하나의 인수를 수행합니다. 이 개체는 연결을 만드는 데 필요한 모든 정보를 제공합니다. SPISettings 개체에는 세 가지 인수가 있습니다.
- 1-6200-005에서 20Mhz인 슬레이브의 최대 클럭 속도입니다.
- 두 번째 인수는 SPI 인터페이스가 가장 중요한 비트 또는 최소 중요 비트 먼저를 사용할지 여부를 결정합니다. 1-6200-005의 경우 가장 중요한 비트 퍼스트(또는 MSBFIRST)입니다.
- 세 번째 인수는 SPI 모드를 결정합니다. 1-6200-005의 경우 SPI 모드 2(CPOL=1, CPHA=0)가 사용됩니다.
// 오픈 SPI 통신 SPI.begin트랜잭션(SPISettings(200000000, MSBFIRST, SPI_MODE2));
SPI.transfer() 함수는 데이터를 보내고 받는 데 사용됩니다. 동시에 명령을 보내고 MISO 핀에서 읽는 모든 것을 반환합니다. 슬레이브는 항상 응답하는 데 1 클럭 주기가 소요됩니다. 따라서 각 명령의 결과는 다음 주기까지 수신되지 않습니다. 예를 들어 아래 코드에서 X 축 낮은 바이트 요청을 보내는 함수는 이 지연으로 인해 X 축 높은 바이트 값을 반환합니다.
0x39 명령은 좋은 측정을 얻는 데 필수적입니다. 이 명령은 보드에 기울기의 새로운 측정을 하도록 지시합니다. 아래 코드에서는 처음에 한 번, 그리고 저온 비트가 수신되는 if 문 끝에 다시 한 번 전송됩니다.
SPI.transfer(0x39); // update sensor data
delay(1); // wait for SPI response
res = SPI.transfer(0x31); // get status, request high x byte
delay(1); // wait for SPI response
if (res == 0x2A) { // verify sensor data updated successfully
high = SPI.transfer(0x32); // get high x byte, request low x byte
delay(1); // wait for SPI response
low = SPI.transfer(0x33); // get low x byte, request high y byte
x = (high << 8) | low; // merge low and high bytes into int
delay(1); // wait for SPI response
high = SPI.transfer(0x34); // get high y byte, request low y byte
delay(1); // wait for SPI response
low = SPI.transfer(0x35); // get low y byte, request high temperature byte
y = (high << 8) | low; // merge low and high bytes into int
delay(1); // wait for SPI response
high = SPI.transfer(0x36); // get high temp byte, request low temp byte
delay(1); // wait for SPI response
low = SPI.transfer(0x39); // get low temperature byte, update sensor data
temperature = (high << 8) | low; // merge low and high bytes into int
}
SPI.endTransaction(); // close the SPI communication
Note that the responses will be in separate high and low bytes. The code above converts these to 16-bit integers using the expression (high << 8) | low.
SPI 버스
또한 SPI 버스에서 1-6200-005 신호 컨디셔너를 함께 연결할 수도 있습니다. SPI 버스를 사용하면 모든 SPI 장치가 CLK, MISO 및 MOSI 연결을 공유할 수 있습니다. 그러나 각 슬레이브는 자체 SS 연결을 통해 마스터가 통신하려는 슬레이브를 선택할 수 있습니다. 한 번에 사용할 수 있는 SPI 장치의 수는 수행할 수 있는 독립적인 SS 연결 수에 의해 제한됩니다. 그림 4는 SS 신호로 사용되는 핀 D9 및 D10이 있는 SPI 버스의 센서 2개에 대한 회로도를 보여줍니다.
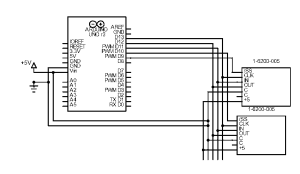
그림 4 1-6200-005의 두 대를 아두이노와 SPI 버스로 연결하는 회로도. 각 장치에 대한 별도의 /SS 연결 주
이 코드는 단일 SPI 장치의 코드와 매우 유사합니다. SS 핀은 통신되는 슬레이브를 제어하도록 변경됩니다.
// open SPI communication
SPI.beginTransaction(SPISettings(20000000, MSBFIRST, SPI_MODE2));
digitalWrite(10, LOW); // enable the slave controlled by D10
SPI.transfer(0x39); // request status
delay(1);
res = SPI.transfer(0x31); // get status, request high x byte
delay(1);
if (res == 0x2A) {
hi = SPI.transfer(0x32); // get high x byte, request low x byte
delay(1);
lo = SPI.transfer(0x33); // get low x byte, request high y byte
x = (hi << 8) | lo;
delay(1);
hi = SPI.transfer(0x34); // get high y byte, request low y byte
delay(1);
lo = SPI.transfer(0x35); // get low y byte, request high temperature byte
y = (hi << 8) | lo;
delay(1);
hi = SPI.transfer(0x36); // get high temperature byte, request low temperature byte
delay(1);
lo = SPI.transfer(0x39); // get low temperature byte
temperature = (hi << 8) | lo;
}
digitalWrite(10, HIGH); // disable the slave controlled by D10
digitalWrite(9, LOW); // enable the slave controlled by D9
SPI.transfer(0x39); // request status
delay(1);
res = SPI.transfer(0x31); // get status, request high x byte
delay(1);
if (res == 0x2A) {
hi = SPI.transfer(0x32); // get high x byte, request low x byte
delay(1);
lo = SPI.transfer(0x33); // get low x byte, request high y byte
x = (hi << 8) | lo;
delay(1);
hi = SPI.transfer(0x34); // get high y byte, request low y byte
delay(1);
lo = SPI.transfer(0x35); // get low y byte, request high temperature byte
y = (hi << 8) | lo;
delay(1);
hi = SPI.transfer(0x36); // get high temperature byte, request low temperature byte
delay(1);
lo = SPI.transfer(0x39); // get low temperature byte
temperature = (hi << 8) | lo;
}
digitalWrite(9, HIGH); // disable the slave controlled by D9
SPI.endTransaction(); // close the SPI communication
2개의 SPI 슬레이브를 동시에 활성화하고 메시지가 전송되면 신호가 방해되고 응답이 제대로 읽지 않습니다.
RS-232
RS-232(TIA-232)는 일반적인 직렬 통신 프로토콜이다. RS-232의 3선 버전은 1-6200-006 및 1-6200-012 신호 컨디셔너모두에서 사용할 수 있습니다. RS-232를 연결하는 것은 부지를 함께 연결하고 각 Rx를 다른 장치의 Tx에 연결하는 것으로 구성됩니다.
이 응용 프로그램에서는 Arduino의 SoftwareSerial 라이브러리를 사용하여 사용할 가상 직렬 포트를 만듭니다. 이 라이브러리는 센서와 통신하는 데 필요한 포트의 신호를 반전할 수 있는 기능을 제공합니다. 또한 하드웨어 직렬 포트를 다른 용도로 사용할 수 있습니다. RS-232의 회로를 만들려면 D10(가상 RX 핀)을 OUT 및 D11(가상 TX)에 IN에 연결하기만 하면 됩니다. 이는 그림 5에 표시됩니다.
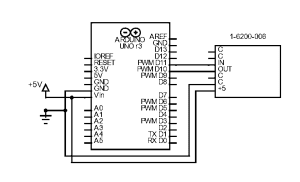
그림 5 RS-232및 소프트웨어 시리얼 라이브러리와 아두이노에 1-6200-006연결 회로도
SoftwareSerial를 사용하면 다음 코드로 가상 직렬 포트를 초기화할 수 있습니다.
SoftwareSerial Sensor(10, 11, true); //RX, TX, inverse
void setup() {
Sensor.begin(9600); //RX, TX, invert
}
UART TTL 직렬 포트(예: Arduino)가 있는 장치에는 반전된 직렬 연결이 필요하거나 통신할 수 없습니다. Arduino를 사용하면 가상 직렬 포트를 만들 때 세 번째 인수로 수행됩니다(반전된 신호에 대해 "true").
먼저 RS-232를 통해 기울기를 읽으려면 원하는 데이터에 대한 명령을 보낸 다음 포트에서 데이터를 읽습니다. x 축, y축 및 온도 값을 읽을 수 있는 코드는 다음과 같습니다.
Sensor.print('x'); // send command for x axis tilt
delay(50); // delay to give time for response
b = 0;
while (Sensor.available() != 0 && b < 8) {
x[b++] = Sensor.read(); // read received bytes into char array
}
Sensor.print('y'); // send command for y axis tilt
delay(50);
b = 0;
while (Sensor.available() != 0 && b < 8) {
y[b++] = Sensor.read();
}
Sensor.print('t'); // send command for temperature
delay(50);
b = 0;
while (Sensor.available() != 0 && b < 8) {
temperature[b++] = Sensor.read();
}
모든 RS-232 명령의 정의는 신호 조절기의 데이터시트에서 사용할 수 있습니다.
이 코드의 응답은 8바이트 문자 배열로, 새로운 라인 및 캐리지 반환 문자(0x0a, 0x0d)로 종료됩니다. 문자열이 아니므로 문자열로 변환해야 할 가능성이 큽입니다. 필요한 경우 int로 변환할 수도 있습니다.
// 샤어 배열을 문자열로 변환 x[b - 2] = '\0'; // 문자열을 16비트 int로 변환 xInt = 아토이 (x);
위의 코드는 새 줄 문자를 null 문자로 대체하여 마지막 문자 직후 문자열을 종료합니다. 이렇게 하려면 b 변수를 사용 하 여 필요 하므로 측정을 받은 후 즉시 수행 해야 할 수 있습니다. b 변수를 사용하지 않고 이를 달성하기 위해 종료 문자도 배열 끝에 배치할 수 있지만 후행 공간과 문자를 남깁니다.
RS-485
RS-485(TIA-485)는 장거리 및 전기 적으로 시끄러운 환경에서 잘 작동하는 직렬 통신 표준입니다. 1-6200-008 신호 컨디셔너에서 사용할 수 있습니다. Arduino Uno자체적으로 RS-485를 지원하지 않지만 변환기를 사용하여 RS-485 제품에 대한 통신을 용이하게 할 수 있습니다.
대부분의 RS-485 컨버터에서 DI(데이터 인) 및 RO(수신)는 각각 Rx 및 Tx입니다. 변환기가 RS-485 데이터를 보내고 받을 때 RE(사용 지원 수신) 및 DE(데이터 사용) 제어; 일반적으로 함께 연결하고 전환할 수 있습니다(높은 데이터를 전송하고 데이터를 수신하기 위해 낮음). 컨버터의 A 및 B 연결은 신호 컨디셔너에서 A와 B에 연결됩니다. 이 회로에 대한 회로는 그림 6으로 표시됩니다.
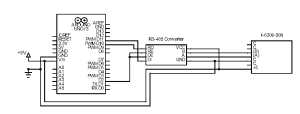
그림 6 RS-485와 아두이노에 1-6200-008연결 에 대한 회로도. 중개자로 사용되는 RS-485 컨버터
신호 컨디셔너와 통신하는 데 사용되는 RS-485 명령은 다음 형식을 사용합니다.
*xxyy #
*는 각 명령을 시작하는 시작 문자입니다. xx는 명령이 전송되는 주소입니다. 기본적으로 1-6200-008에서 99가 됩니다. yy는 명령 자체입니다. #은 명령의 끝을 신호합니다. 예를 들어 주소 99에서 x 축 기울기를 읽는 명령은 *9911#입니다. 사용 가능한 모든 명령은 1-6200-008 데이터 시트에서 찾을 수 있습니다.
RS-232에서 RS-485 컨버터 인라인을 사용하면 이러한 명령을 RS-232로 변환기로 보낼 수 있습니다. 그런 다음 변환기가 RS-485를 사용하여 신호 컨디셔너로 전송됩니다. 설정 기능은 RS-232 신호 컨디셔너와 동일합니다. 아래 코드는 이 구성을 사용하여 신호 컨디셔너에서 데이터를 읽는 방법을 보여 주며 다음과 같습니다.
// x axis tilt
digitalWrite(9, HIGH); // enable transmission
Sensor.print("*9911#"); // send x axis command
digitalWrite(9, LOW); // enable reception
delay(25); // wait for sensor to respond
b = 0;
while (Sensor.available()) {
x[b++] = Sensor.read(); // store response in a char array
}
// y axis tilt
digitalWrite(9, HIGH); // enable transmission
Sensor.print("*9921#"); // send y axis command
digitalWrite(9, LOW); // enable reception
delay(25);
b = 0;
while (Sensor.available()) {
y[b++] = Sensor.read(); // store response in char array
}
// temperature
digitalWrite(9, HIGH); // enable transmission
Sensor.print("*9941#"); // send temperature command
digitalWrite(9, LOW); // enable reception
delay(25);
b = 0;
while (Sensor.available()) {
temperature[b++] = Sensor.read(); // store response
}
RS-232와 마찬가지로 응답은 새 줄및 캐리지 리턴으로 종료되는 문자 배열이 됩니다. 배열을 문자열로 처리하려면 null 문자('\0')를 부더야 합니다.
주소가 있는 RS-485
최대 32 1-6200-008 신호 컨디셔너를 단일 버스에 연결할 수 있습니다. 그런 다음 신호 컨디셔너는 주소를 할당할 수 있으며 각 센서가 응답 여부를 결정할 수 있는 방법을 제공합니다. 센서가 서로의 변속기를 방해하기 때문에 여러 센서를 동일한 주소로 연결하지 않는 것이 중요합니다.
기본적으로 신호 컨디셔너의 주소는 99입니다. 변경하려면 해당 주소와 연결된 유일한 장치인지 확인합니다. 그런 다음 xx81Azz #명령을 사용하여 xx가 현재 주소이고 zz가 새 주소인 경우 를 사용합니다. 예를 들어:
Sensor.print("*9981A01#"); // 주소 변경 99에서 01로 변경
주소가 변경되면 99로 시작하는 명령을 사용하여 센서에 액세스할 수 없습니다. 대신 새 주소 01은 모든 명령에서 99를 대체합니다. 예를 들어 제품 정보를 읽는 명령은 위의 명령을 실행한 후 *9980#에서 *0180#으로 변경됩니다.
각 센서에 고유한 주소가 할당되면 회로에 연결할 수 있습니다. 각 신호 컨디셔너는 추가 구성 요소 나 연결없이 동일한 버스에 연결할 수 있습니다. 이를 보여주는 회로도는 그림 7을 참조하십시오.
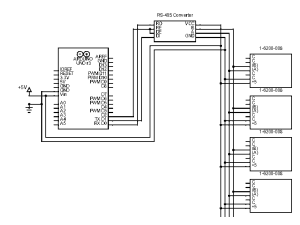
그림 7 RS-485를 가진 아두이노에 (4) 1-6200-008 신호 컨디셔너를 연결하기 위한 회로도
여러 개의 주소가 지정된 RS-485 센서에서 읽는 프로그램의 예가 아래에 있습니다. 이 코드는 8 - 11을 해결 4 센서에 연결된 회로에 대해 작성됩니다.
char addr[4][3] = {"08", "09", "10", "11"};
for (int i = 0; i < 4; i++) { // run this code for every address
// x axis tilt
digitalWrite(9, HIGH); // enable transmission
sprintf(cmd, "*%2s11#", addr[i]); // create x axis command
Sensor.print(cmd); // send x axis command
digitalWrite(9, LOW); // enable reception
delay(25); // wait for sensor to respond
b = 0;
while (Sensor.available()) {
x[b++] = Sensor.read(); // store response from sensor in a char array
}
// y axis tilt
digitalWrite(9, HIGH); // enable transmission
sprintf(cmd, "*%2s21#", addr[i]); // create command
Sensor.print(cmd); // send command
digitalWrite(9, LOW); // enable reception
delay(25);
b = 0;
while (Sensor.available()) {
y[b++] = Sensor.read(); // store response
}
// temperature
digitalWrite(9, HIGH); // enable transmission
sprintf(cmd, "*%2s41#", addr[i]); // create command
Sensor.print(cmd); // send command
digitalWrite(9, LOW); // enable reception
delay(25);
b = 0;
while (Sensor.available()) {
temperature[b++] = Sensor.read(); // store response
}
}
응답은 16비트 번호에 대한 ASCII 문자를 포함하는 8바이트 문자 배열입니다.